
Introduction
Our robot needs to do more than just move backwards and forwards if we are going to explore Mars - let's learn how to make it turn!
Tools
No tools specified.
-
-
Your robot should be setup in the same way as the previous section!
-
Don't forget that the left motor should be plugged into M1, and the right motor into M2!
-
-
-
Turning a car is easy - you can just rotate the wheels!
-
However the wheels on most robots are fixed, so we have to do something different.
-
Fixed wheel machines steer using 'skid steering' - exactly the same way as a tank! You might have also seen small diggers that have 4 fixed wheels steering like this as well.
-
Skid steering is easy - you just increase or decrease the speed of one wheel, and the robot will turn!
-
-
-
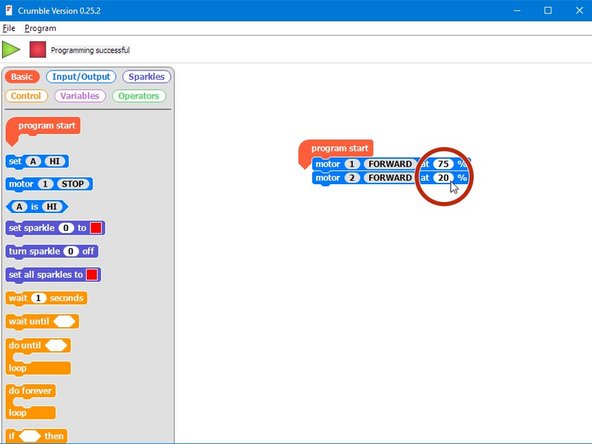
Create a simple sequence to make your robot drive forwards
-
Now change the speed of one of the wheels, and upload your code.
-
Which way do you think the robot will turn? How can you make it turn faster? Experiment and find out for yourself!
-
-
-
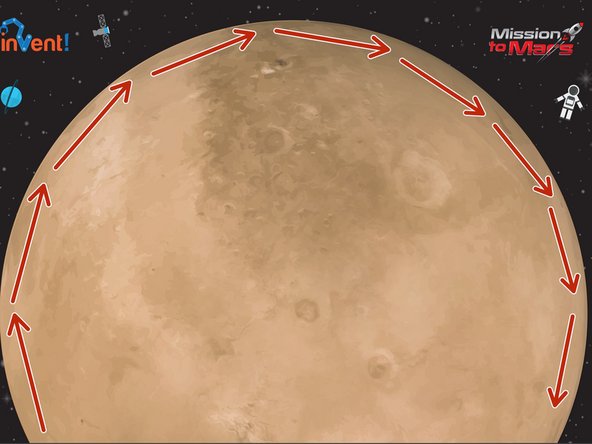
Let's use what we've learned to pickup the stranded astronaut again.
-
This time, pickup the astronaut by driving your robot around the outside of the planet! Try and stay as close as you can to the edge.
-
Make sure you end up where you started from.
-
-
-
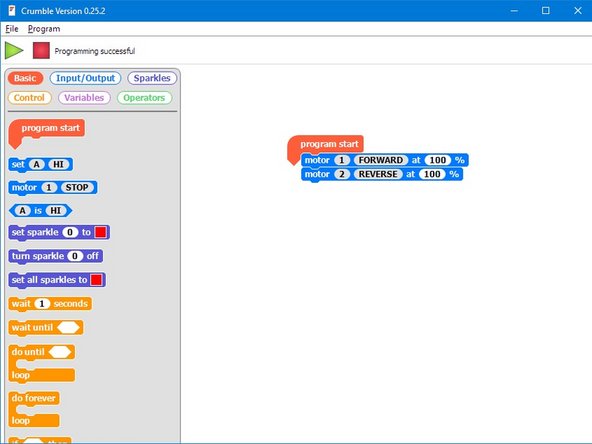
You may have worked this out already, but we can actually make our robot spin on the spot if we want to!
-
Try making one motor go forwards at 100%, and the other backwards at 100%. Your robot should spin on the spot!
-
-
-
Now we can turn the robot, let's pick up the astronaut by driving across the planet, but come back facing forwards!
-
Write a program to go and pick up the astronaut, turn on the spot and drive back to base going forwards.
-





Cancel: I did not complete this guide.
2 other people completed this guide.

Team
