
Introduction
You've discovered an underground system of tunnels under the planet surface, but they are too dangerous to explore! Let's get our robot to explore instead.
-
-
First, we need to make a system of tunnels to test the robot exploration program with. You can do this individually, or in groups.
-
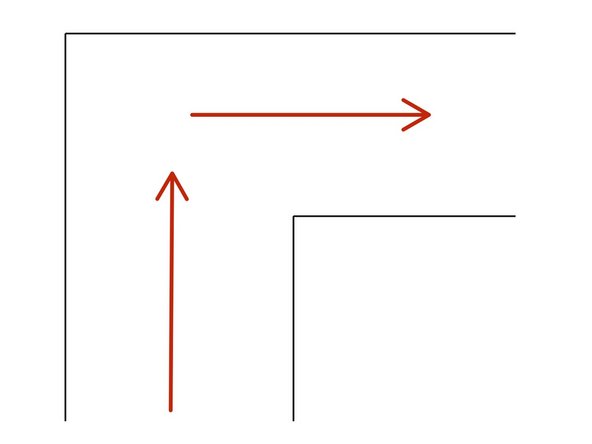
The tunnel system under the planet is made of straight walls all at 90 degrees to each other, like the maze in the picture.
-
For now, make a small section of maze like the second picture - just a simple right turn.
-
You can use books, cardboard and tape or anything else sensible you can think of! Make sure the walls are taller than your robot.
-
The walls must be at least 25cm apart so your robot has room to turn - this is very important!
-
-
-
Setup your robot like the picture - make sure everything is in exactly the right place or your robot won't balance properly.
-
The left motor should be in M1, the right motor in M2, and the switch in A.
-
The trackball goes directly underneath the switch again.
-
-
-
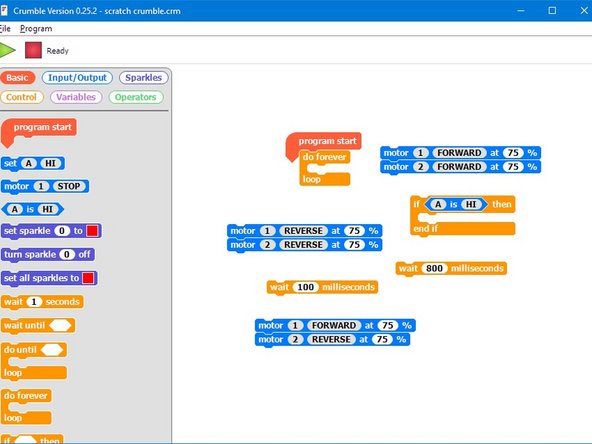
Let's write a simple program to make the robot navigate the right turn. Your program should:
-
Drive forwards
-
If the switch is pressed, reverse slightly, then turn right 90 degrees
-
Drive forwards again
-
You should just need 1 IF block to complete this - check the second image for a hint of the blocks required if you need to.
-
Be sure to test it properly on your maze section until it works reliably!
-
-
-
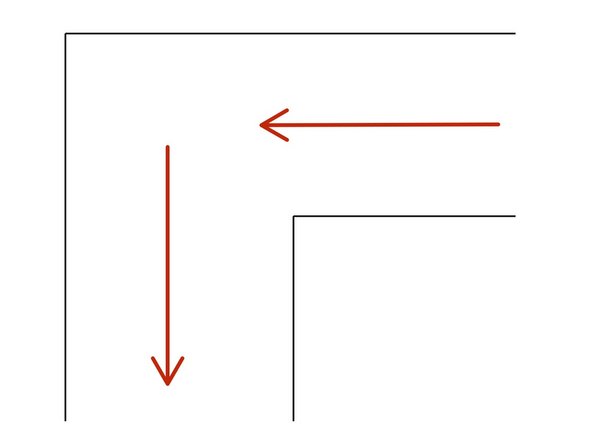
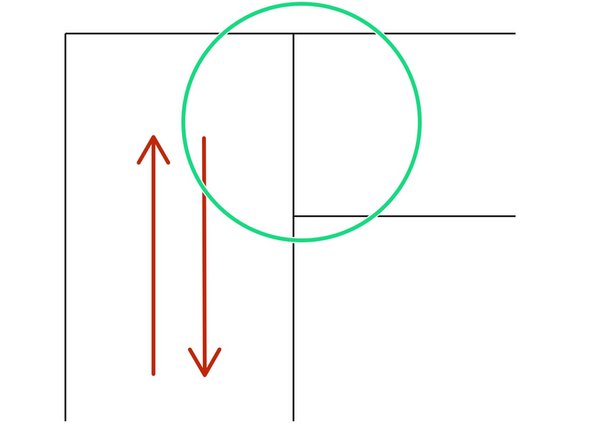
When your robot is able to make the right turn correctly, try running it through the maze section from the other direction, to try a left turn.
-
Did it behave how you expected?
-
Your robot probably turned right 90 degrees, hit the other wall, turned right 90 degrees again and went back where it came from!
-
This is no good - the robot will never make it through the tunnels! Can you think how to fix it?
-
-
-
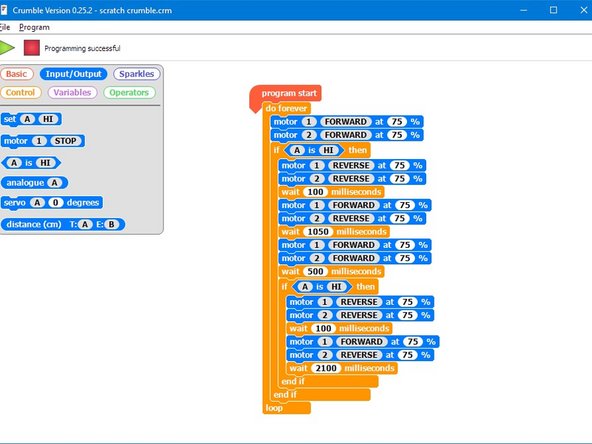
To fix this, we need to write a program that can work out whether we need to turn left or right.
-
If you think you know how to do this, great - try it out! If not, here is a way that might work:
-
If the switch is pressed, always turn right 90 degrees.
-
Move forward a small amount, and if the switch is pressed again, we must be at a left turn!
-
Spin 180 degrees, then continue driving forwards
-
Check out the video for how your robot should handle the left turn if you're still not sure!
-
Here's a hint - you will need to put an If block inside another IF block.
-
-
-
Now our robot can handle almost anything underground, but what about a dead end?
-
Add another IF block to your program to check if the switch is being pressed after the 180 degree turn, and if it is, turn back!
-
There's some example code for a program that can deal with left and right turns in the second image if you are stuck.
-
Add another wall to your test maze so you can properly test your code!
-
-
-
Time for a real test of your program!
-
As a group, combine all the small maze pieces into one large maze, with at least one left turn, one right turn and a dead end. The bigger the better!
-
Time each other's robots and see who can get through the maze the fastest!
-
You will probably want to do some test runs first so you can adjust your program so it is as fast as possible.
-
-
-
For the super advanced explorers, you could try using two switch modules like in the obstacle avoidance challenge, to see if you can do the maze any faster.
-
You could also experiment with the positioning of the wheels, switches and trackball on your robot to see which positions work the best.
-
In short, try experimenting with anything you think might improve the performance of you robot!
-









Team
