
Introduction
Using all the things you've learned so far, build them all into one big line follower program that is as clever and reliable as possible!
-
-
Whilst line following robots are very important in factories, speed line following competitions are very popular in Universities and schools all over the world.
-
Have a look at the video from a competition in Japan - this robot even does 2 runs. On the first run it learns the track so it can go really fast on the second run!
-
-
-
Your teacher will tell you exactly what course you will be racing on, but it could contain anything you have learnt so far:
-
Curvy tracks
-
Breaks in the track
-
Sharp Turns
-
Obstacles
-
You need to make the best program you possibly can to complete the course in the fastest time.
-
You will have a chance to test your robot on the course before the race at the end.
-
-
-
A proportional system will usually be faster than a simple digital one
-
Test your robot as much as you can to find out where it might go wrong!
-
Use Sparkles as feedback to help you work out exactly what your robot is doing
-
Try and have something in your program that attempts to find the line again if the robot gets lost - you never know what will happen on the final run!
-
Try to keep your program simple (don't use more blocks than you need to) to keep it running quickly.
-
Good luck!
-
-
-
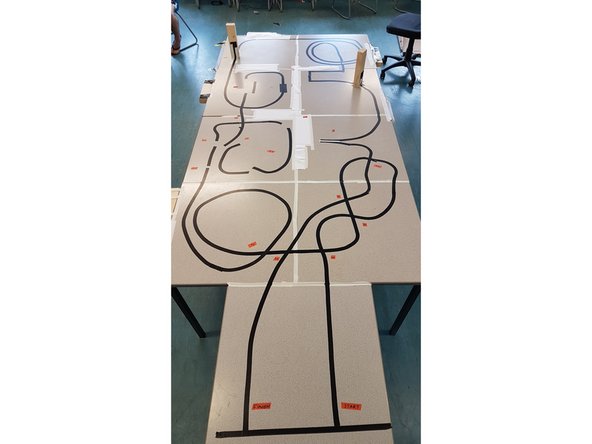
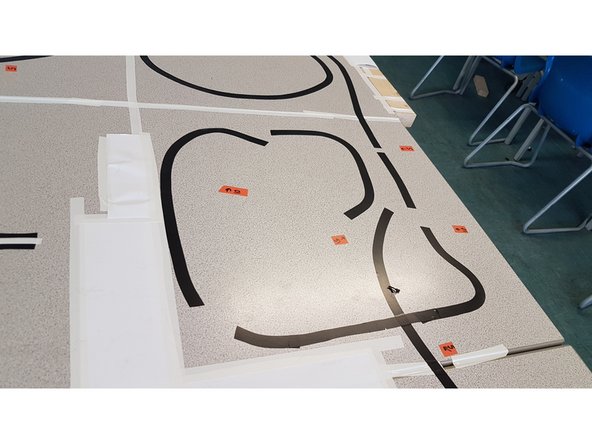
Here are some examples of obstacles you could use in a course!
-
You can assign points to each obstacle, so each one successfully navigated gets a certain number of points, depending on the difficulty.
-
-
-
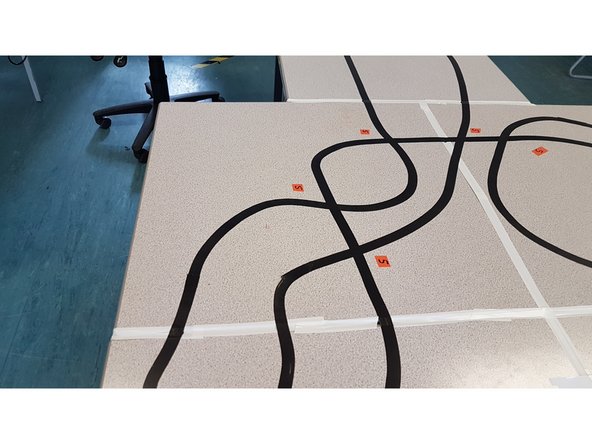
Here are some crossovers and tightly packed tracks.
-
-
-
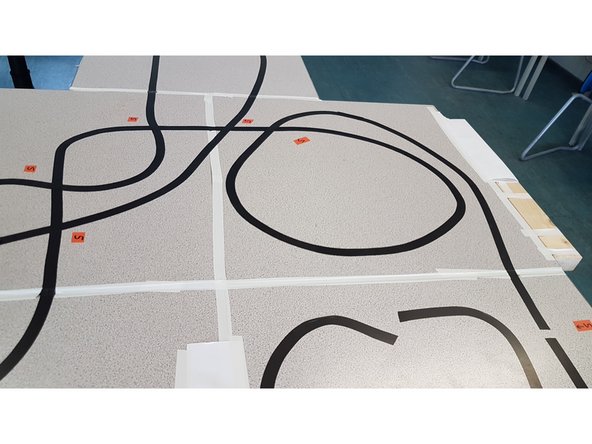
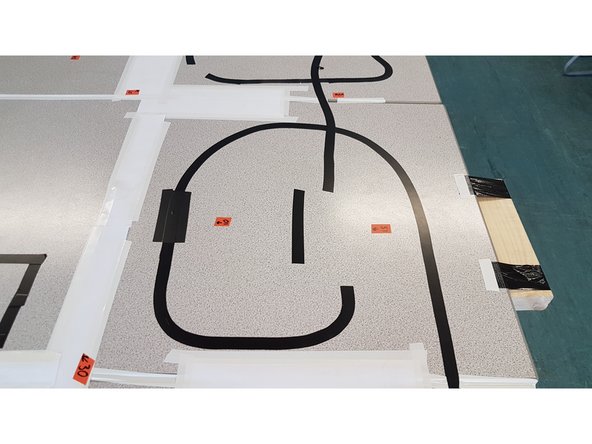
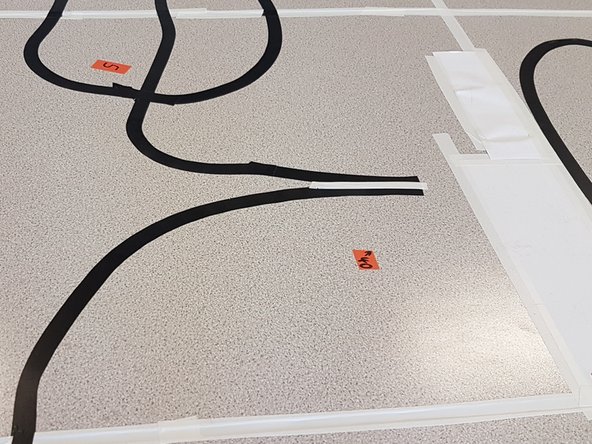
Straight breaks, curved breaks and offset breaks
-
-
-
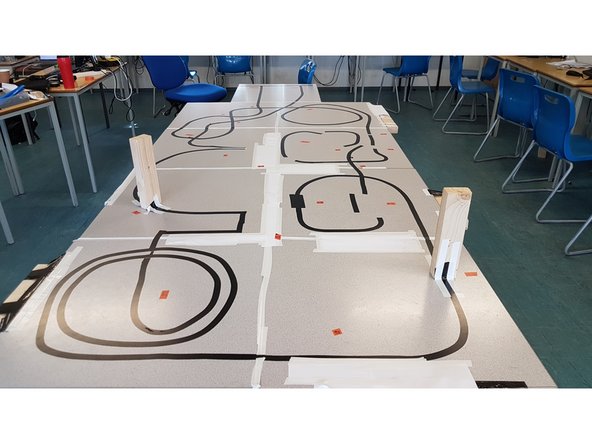
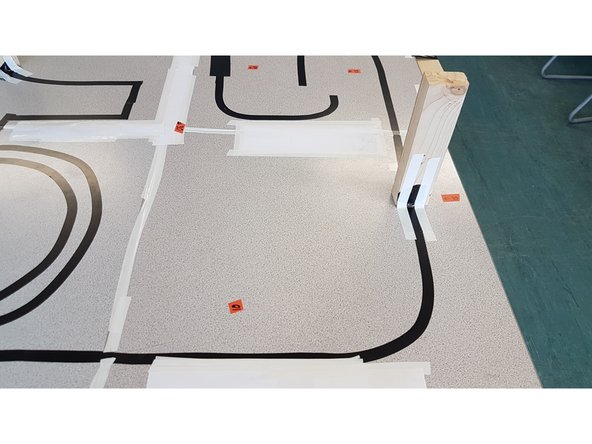
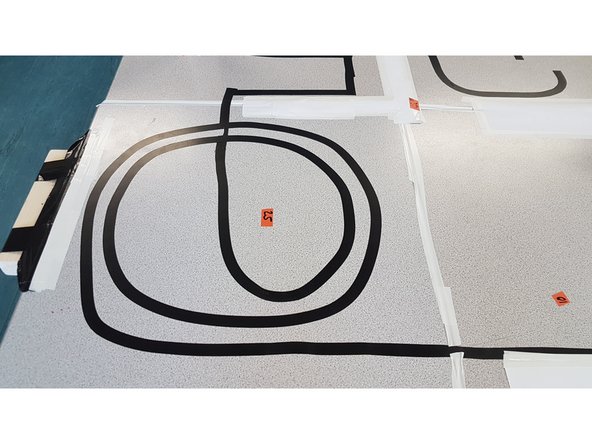
Obstacles (on curved and straight track), thin sections and a spiral
-
-
-
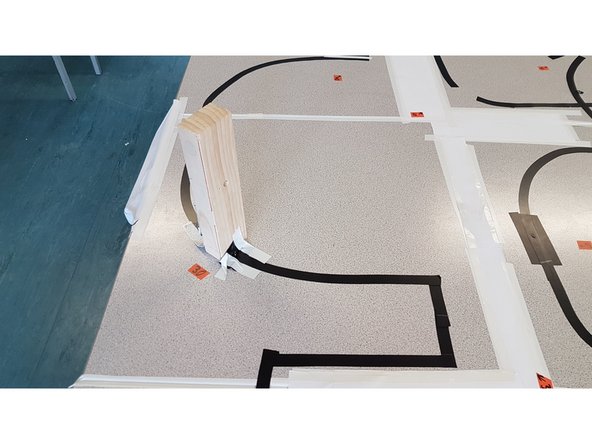
This one is very difficult - the dead end switchback!
-



Team
